Gibanje točke u prostoru može se smatrati danim ako su poznati zakoni promjene njezinih triju Kartezijevih koordinata x, y, z u funkciji vremena. Međutim, u nekim slučajevima prostornog gibanja materijalnih točaka (primjerice, u područjima ograničenim plohama različitih oblika), korištenje jednadžbi gibanja u Kartezijevim koordinatama je nezgodno, jer one postaju preglomazne. U takvim slučajevima možete odabrati druga tri neovisna skalarna parametra $q_1,(\q)_2,\\q_3$, nazvana krivocrtne ili generalizirane koordinate, koji također jednoznačno određuju položaj točke u prostoru.
Brzina točke M, kada se zadaje njezino kretanje u krivuljastim koordinatama, odredit će se u obliku vektorskog zbroja komponenata brzine paralelnih s koordinatnim osima:
\[\overrightarrow(v)=\frac(d\overrightarrow(r))(dt)=\frac(\partial \overrightarrow(r))(\partial q_1)\dot(q_1)+\frac(\partial \ desna strelica(r))(\partial q_2)\dot(q_2)+\frac(\partial \overrightarrow(r))(\partial q_3)\dot(q_3)=v_(q_1)\overline(e_1)+v_( q_2)\overline(e_2)\ +v_(q_3)\overline(e_3)\]
Projekcije vektora brzine na odgovarajuće koordinatne osi jednake su: $v_(q_i)=\overline(v\ )\cdot \overline(e_i)=H_i\dot(q_i)\ \ ,\ \ i=\overline (1,3) $
Ovdje je $H_i=\left|(\left(\frac(\partial \overrightarrow(r))(\partial q_i)\right))_M\right|$ parametar tzv. i-ti koeficijent Lame i jednaka je vrijednosti modula parcijalne derivacije radijus vektora točke duž i-te krivocrtne koordinate izračunate u danoj točki M. Svaki od vektora $\overline(e_i)$ ima smjer koji odgovara na smjer kretanje točke kraj radijus vektora $r_i$ na povećanje i-tog generalizirane koordinate. Modul brzine u ortogonalnom krivocrtnom koordinatnom sustavu može se izračunati iz ovisnosti:
U gornjim formulama, vrijednosti izvodnica i Lamé koeficijenata izračunate su za trenutni položaj točke M u prostoru.
Koordinate točke u sfernom koordinatnom sustavu su skalarni parametri r, $(\mathbf \varphi ),\ (\mathbf \theta )$, izmjereni kao što je prikazano na slici. 1.
Slika 1. Vektor brzine u sfernom koordinatnom sustavu
Sustav jednadžbi gibanja točke u ovom slučaju ima oblik:
\[\lijevo\( \begin(niz)(c) r=r(t) \\ \varphi =\varphi (t \\ \theta =\theta (t \end(niz) \desno.\]
Na sl. Slika 1 prikazuje radijus vektor r povučen iz ishodišta, kutove $(\mathbf \varphi )$ i $(\mathbf \theta )$, kao i koordinatne linije i osi sustava koji se razmatra u proizvoljnoj točki M putanja. Vidi se da koordinatne linije $((\mathbf \varphi ))$ i $((\mathbf \theta ))$ leže na površini kugle polumjera r. Ovaj krivocrtni koordinatni sustav također je ortogonalan. Kartezijeve koordinate može se izraziti u smislu sfernih koordinata ovako:
Zatim Lameovi koeficijenti: $H_r=1;\ \ H_(\varphi )=rsin\varphi ;\ \ H_0=r$ ; projekcije brzine točke na os sfernog koordinatnog sustava $v_r=\dot(r\ \ );$ $v_(\theta )=r\dot(\theta )$; $\ v_(\varphi )=r\dot(\varphi )sin\theta $, i veličina vektora brzine
Ubrzanje točke u sfernom koordinatnom sustavu
\[\overrightarrow(a)=a_r(\overrightarrow(e))_r+a_(\varphi )(\overrightarrow(e))_(\varphi )+a_(\theta )(\overrightarrow(e))_( \theta),\]
projekcije ubrzanja točke na os sfernog koordinatnog sustava
\ \
Modul ubrzanja $a=\sqrt(a^2_r+a^2_(\varphi )+a^2_(\theta ))$
Problem 1
Točka se kreće duž presječne linije sfere i valjka prema jednadžbama: r = R, $\varphi $ = kt/2, $\theta $ = kt/2 , (r, $\varphi $, $ \theta $ --- sferični koordinate). Odredite modul i projekcije brzine točke na os sfernog koordinatnog sustava.
Nađimo projekcije vektora brzine na sferne koordinatne osi:
Modul brzine $v=\sqrt(v^2_r+v^2_(\varphi )+v^2_(\theta ))=R\frac(k)(2)\sqrt((sin)^2\frac(kt) )(2)+1)$
Problem 2
Pomoću uvjeta zadatka 1 odredite modul ubrzanja točke.
Nađimo projekcije vektora ubrzanja na sferne koordinatne osi:
\ \ \
Modul ubrzanja $a=\sqrt(a^2_r+a^2_(\varphi )+a^2_(\theta ))=R\frac(k^2)(4)\sqrt(4+(sin)^2 \frac(kt)(2))$
zadaci kretanja
Iskoristimo jednadžbu (4) i uzmimo njenu derivaciju u odnosu na vrijeme
U (8) za jedinične vektore postoje projekcije vektora brzine na koordinatne osi
Projekcije brzine na koordinatne osi definirane su kao prve vremenske derivacije odgovarajućih koordinata.
Poznavajući projekcije, možete pronaći veličinu vektora i njegov smjer
 ,
(10)
,
(10)
Određivanje brzine prirodnom metodom
zadaci kretanja
Neka je dana putanja materijalna točka i zakon promjene krivolinijske koordinate. Pretpostavimo, na t imao 1 bod  i koordinata s 1, i na t 2 – koordinata s 2. Tijekom
i koordinata s 1, i na t 2 – koordinata s 2. Tijekom
 koordinata je povećana
koordinata je povećana  , zatim prosječna brzina točke
, zatim prosječna brzina točke
 .
.
Da bismo pronašli brzinu u određenom trenutku, idemo do granice
 ,
,
 .
(12)
.
(12)
Vektor brzine točke u prirodnom načinu određivanja gibanja definiran je kao prva vremenska derivacija krivocrtne koordinate.
Ubrzanje točke
Pod akceleracijom materijalne točke razumjeti vektorsku veličinu koja karakterizira brzinu promjene vektora brzine točke u veličini i smjeru tijekom vremena.
Ubrzanje točke pomoću vektorske metode zadavanja gibanja
Razmotrite točku u dvije točke u vremenu t 1
( ) I t 2
(
) I t 2
( ), Zatim
), Zatim  - vremenski prirast,
- vremenski prirast,  - povećanje brzine.
- povećanje brzine.
Vektor  uvijek leži u ravnini gibanja i usmjerena je prema konkavnosti putanje.
uvijek leži u ravnini gibanja i usmjerena je prema konkavnosti putanje.
P 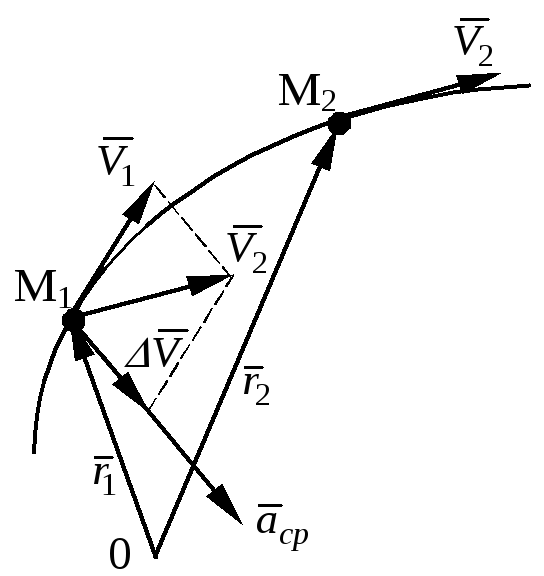 od prosječno ubrzanje točke tijekom
t
razumjeti veličinu
od prosječno ubrzanje točke tijekom
t
razumjeti veličinu
 .
(13)
.
(13)
Da bismo pronašli ubrzanje u određenom trenutku, idemo do granice
 ,
,
 .
(14)
.
(14)
Ubrzanje točke u određenom trenutku definira se kao druga derivacija radijus vektora točke u odnosu na vrijeme ili prva derivacija vektora brzine u odnosu na vrijeme.
Vektor ubrzanja nalazi se u kontaktnoj ravnini i usmjeren je prema konkavnosti putanje.
Ubrzanje točke koordinatnom metodom zadavanja gibanja
Upotrijebimo jednadžbu za vezu između vektorske i koordinatne metode zadavanja kretanja
I uzmimo drugu derivaciju iz toga
 ,
,
 .
(15)
.
(15)
U jednadžbi (15) za jedinične vektore postoje projekcije vektora ubrzanja na koordinatne osi
 .
(16)
.
(16)
Projekcije ubrzanja na koordinatne osi definirane su kao prve derivacije po vremenu iz projekcija brzine ili kao druge derivacije odgovarajućih koordinata po vremenu.
Veličina i smjer vektora ubrzanja mogu se pronaći pomoću sljedećih izraza
 ,
(17)
,
(17)
 ,
,
 ,
, .
(18)
.
(18)
Ubrzanje točke pomoću prirodne metode zadavanja gibanja
P  Neka se točka kreće duž zakrivljene putanje. Razmotrimo njegova dva položaja u trenucima vremena t
(s, M, v) I t 1
(s 1, M 1, v 1).
Neka se točka kreće duž zakrivljene putanje. Razmotrimo njegova dva položaja u trenucima vremena t
(s, M, v) I t 1
(s 1, M 1, v 1).
U ovom slučaju ubrzanje se određuje preko njegovih projekcija na osi prirodnog koordinatnog sustava koje se kreću zajedno s točkom M. Osi su usmjerene na sljedeći način:
M - tangenta, usmjerena duž tangente na putanju, prema pozitivnoj referentnoj udaljenosti,
M n– glavna normala, usmjerena duž normale koja leži u kontaktnoj ravnini, a usmjerena prema konkavnosti putanje,
M b– binormala, okomita na ravninu M n a s prvim osima čini desnu trostruku.
Budući da vektor akceleracije leži u dodirnoj ravnini, tada a b = 0. Nađimo projekcije ubrzanja na ostale osi.
 .
(19)
.
(19)
Projicirajmo (19) na koordinatne osi
 ,
(20)
,
(20)
 .
(21)
.
(21)
Povucimo kroz točku M 1 osi paralelne s osi u točki M i pronađimo projekcije brzine:
Gdje - takozvani kut susjedstva.
Zamijenite (22) u (20)
 .
.
Na t 0 0, cos 1 tada

 .
(23)
.
(23)
Tangencijalno ubrzanje točke određeno je prvom vremenskom derivacijom brzine ili drugom vremenskom derivacijom krivuljaste koordinate.
Tangencijalno ubrzanje karakterizira promjenu vektora brzine u veličini.
Zamijenimo (22) u (21)
 .
.
Pomnožite brojnik i nazivnik sa s da biste dobili poznate granice
Gdje  (prva divna granica),
(prva divna granica),
 ,
, ,
,
 , Gdje
- radijus zakrivljenosti putanje.
, Gdje
- radijus zakrivljenosti putanje.
Zamjenom izračunatih granica u (24) dobivamo
 .
(25)
.
(25)
Normalno ubrzanje točke određeno je omjerom kvadrata brzine i polumjera zakrivljenosti putanje u danoj točki.
Normalno ubrzanje karakterizira promjenu vektora brzine u smjeru i uvijek je usmjereno prema konkavnosti putanje.
Na kraju se dobivaju projekcije ubrzanja materijalne točke na os prirodnog koordinatnog sustava i veličina vektora

 ,
(26)
,
(26)
 .
(27)
.
(27)
Formule za izračunavanje brzine točke, ubrzanja, polumjera zakrivljenosti putanje, tangente, normale i binormale iz zadanih koordinata u odnosu na vrijeme. Primjer rješavanja problema u kojem zadane jednadžbe kretanja, morate odrediti brzinu i ubrzanje točke. Određuje se i radijus zakrivljenosti putanje, tangenta, normala i binormala.
SadržajUvod
Zaključci donjih formula i prikaz teorije dani su na stranici “Kinematika materijalne točke”. Ovdje ćemo primijeniti glavne rezultate ove teorije na koordinatnu metodu zadavanja gibanja materijalne točke.
Neka imamo fiksni pravokutni koordinatni sustav sa središtem u fiksna točka. U tom je slučaju položaj točke M jednoznačno određen njezinim koordinatama (x, y, z). Koordinatna metoda zadavanja kretanja točke- ovo je metoda u kojoj se specificira ovisnost koordinata o vremenu. Odnosno, navedene su tri funkcije vremena (za trodimenzionalno gibanje):
Određivanje kinematičkih veličina
Poznavajući ovisnost koordinata o vremenu, automatski određujemo radijus vektor materijalne točke M pomoću formule:
,
gdje su jedinični vektori (orti) u smjeru x, y, z osi.
Razlikujući s obzirom na vrijeme, nalazimo projekcije brzine i ubrzanja na koordinatne osi:
;
;
Moduli brzine i ubrzanja:
;
.
.
Tangencijalno (tangencijalno) ubrzanje je projekcija ukupnog ubrzanja na smjer brzine:
.
Tangencijalni (tangencijalni) vektor ubrzanja:
Normalno ubrzanje:
.
;
.
Jedinični vektor u smjeru glavne normale putanje:
.
Polumjer zakrivljenosti putanje:
.
Centar zakrivljenosti putanje:
.
.
Primjer rješenja problema
Određivanje brzine i ubrzanja točke pomoću zadanih jednadžbi njezina gibanja
Pomoću zadanih jednadžbi gibanja točke odredite vrstu njezine putanje i za trenutak odredite položaj točke na putanji, njezinu brzinu, ukupnu, tangencijalnu i normalnu akceleraciju, kao i polumjer točke. zakrivljenost putanje.
Jednadžbe gibanja točke:
, cm;
, cm.
Riješenje
Određivanje vrste putanje
Vrijeme isključujemo iz jednadžbi gibanja. Da bismo to učinili, prepisujemo ih u obliku:
;
.
Primijenimo formulu:
.
;
;
;
.
Dakle, dobili smo jednadžbu putanje:
.
Ovo je jednadžba parabole s vrhom u točki i osi simetrije.
Jer
, To
; ili
.
Na sličan način dobivamo ograničenje za koordinatu:
;
;
Dakle, putanja kretanja točke je luk parabole
,
nalazi se na
i .
Od točaka gradimo parabolu.
| 0 | 6 |
| 3 | 5,625 |
| 6 | 4,5 |
| 9 | 2,625 |
| 12 | 0 |
Određujemo položaj točke u trenutku vremena.
;
.
Određivanje brzine točke
Diferenciranjem koordinata i s obzirom na vrijeme nalazimo komponente brzine.
.
Za razlikovanje je zgodno primijeniti trigonometrijsku formulu:
. Zatim
;
.
Izračunavamo vrijednosti komponenti brzine u trenutku vremena:
;
.
Modul brzine:
.
Određivanje ubrzanja točke
Razlikujući komponente brzine i vremena, nalazimo komponente ubrzanja točke.
;
.
Izračunavamo vrijednosti komponenata ubrzanja u trenutku:
;
.
Modul ubrzanja:
.
Tangencijalno ubrzanje je projekcija ukupnog ubrzanja na smjer brzine:
.
Budući da je tangencijalni vektor ubrzanja usmjeren suprotno od brzine.
Normalno ubrzanje:
.
Vektor i usmjeren je prema središtu zakrivljenosti putanje.
Polumjer zakrivljenosti putanje:
.
Putanja točke je luk parabole
;
.
Brzina točke: .
Ubrzanje točke: ; ; .
Polumjer zakrivljenosti putanje: .
Određivanje ostalih veličina
Prilikom rješavanja problema ustanovili smo:
vektor i modul brzine:
;
;
vektor i modul ukupne akceleracije:
;
;
tangencijalno i normalno ubrzanje:
;
;
polumjer zakrivljenosti putanje: .
Odredimo preostale količine.
Jedinični vektor u tangentnom smjeru na stazu:
.
Vektor tangencijalne akceleracije:
.
Vektor normalnog ubrzanja:
.
Jedinični vektor u smjeru glavne normale:
.
Koordinate središta zakrivljenosti putanje:
.
Uvedimo treću os koordinatnog sustava okomitu na osi i . U trodimenzionalnom sustavu
;
.
Jedinični vektor u binormalnom smjeru:
.









