Движението на точка в пространството може да се счита за дадено, ако са известни законите за промяна на нейните три декартови координати x, y, z като функция на времето. Въпреки това, в някои случаи на пространствено движение на материални точки (например в области, ограничени от повърхности с различни форми), използването на уравнения на движение в декартови координати е неудобно, тъй като те стават твърде тромави. В такива случаи можете да изберете други три независими скаларни параметъра $q_1,(\q)_2,\\q_3$, наречени криволинейни или обобщени координати, които също еднозначно определят позицията на точката в пространството.
Скоростта на точка М, когато се задава нейното движение в криволинейни координати, ще бъде определена под формата на векторна сума от компоненти на скоростта, успоредни на координатните оси:
\[\overrightarrow(v)=\frac(d\overrightarrow(r))(dt)=\frac(\partial \overrightarrow(r))(\partial q_1)\dot(q_1)+\frac(\partial \ overrightarrow(r))(\partial q_2)\dot(q_2)+\frac(\partial \overrightarrow(r))(\partial q_3)\dot(q_3)=v_(q_1)\overline(e_1)+v_( q_2)\overline(e_2)\ +v_(q_3)\overline(e_3)\]
Проекциите на вектора на скоростта върху съответните координатни оси са равни на: $v_(q_i)=\overline(v\ )\cdot \overline(e_i)=H_i\dot(q_i)\ \ ,\ \ i=\overline (1,3)$
Тук $H_i=\left|(\left(\frac(\partial \overrightarrow(r))(\partial q_i)\right))_M\right|$ е параметър, наречен i-ти коефициент Lame и е равен на модула на частната производна на радиус вектора на точката по i-та криволинейна координата, изчислена в дадена точка M. Всеки от векторите $\overline(e_i)$ има посока, съответстваща на посоката точково движениекрай на радиус вектора $r_i$ при нарастващ i-тиобобщени координати. Модулът на скоростта в ортогонална криволинейна координатна система може да се изчисли от зависимостта:
В горните формули стойностите на производните и коефициентите на Lamé се изчисляват за текущата позиция на точка M в пространството.
Координатите на точка в сферична координатна система са скаларните параметри r, $(\mathbf \varphi),\ (\mathbf \theta)$, измерени, както е показано на фиг. 1.
Фигура 1. Вектор на скоростта в сферична координатна система
Системата от уравнения на движение на точка в този случай има формата:
\[\left\( \begin(array)(c) r=r(t) \\ \varphi =\varphi (t \\ \theta =\theta (t \end(array) \right.\]
На фиг. Фигура 1 показва радиус вектора r, изтеглен от началото, ъгли $(\mathbf \varphi )$ и $(\mathbf \theta )$, както и координатни линии и оси на разглежданата система в произволна точка M от траектория. Може да се види, че координатните линии $((\mathbf \varphi ))$ и $((\mathbf \theta ))$ лежат на повърхността на сфера с радиус r. Тази криволинейна координатна система също е ортогонална. Декартови координатиможе да се изрази чрез сферични координати по следния начин:
Тогава коефициентите на Ламе: $H_r=1;\ \ H_(\varphi )=rsin\varphi ;\ \ H_0=r$ ; проекции на скоростта на точката върху оста на сферичната координатна система $v_r=\dot(r\ \ );$ $v_(\theta )=r\dot(\theta )$; $\ v_(\varphi )=r\dot(\varphi )sin\theta $ и големината на вектора на скоростта
Ускорение на точка в сферична координатна система
\[\overrightarrow(a)=a_r(\overrightarrow(e))_r+a_(\varphi )(\overrightarrow(e))_(\varphi )+a_(\theta )(\overrightarrow(e))_( \тета),\]
проекции на ускорението на точка върху оста на сферична координатна система
\ \
Модул за ускорение $a=\sqrt(a^2_r+a^2_(\varphi )+a^2_(\theta ))$
Проблем 1
Точката се движи по линията на пресичане на сферата и цилиндъра съгласно уравненията: r = R, $\varphi $ = kt/2, $\theta $ = kt/2 , (r, $\varphi $, $ \theta $ --- сферичнакоординати). Намерете модула и проекциите на скоростта на точката върху оста на сферичната координатна система.
Нека намерим проекциите на вектора на скоростта върху сферичните координатни оси:
Модул на скоростта $v=\sqrt(v^2_r+v^2_(\varphi )+v^2_(\theta ))=R\frac(k)(2)\sqrt((sin)^2\frac(kt) )(2)+1)$
Проблем 2
Използвайки условието на задача 1, определете модула на ускорение на точката.
Нека намерим проекциите на вектора на ускорението върху сферичните координатни оси:
\ \ \
Модул за ускорение $a=\sqrt(a^2_r+a^2_(\varphi )+a^2_(\theta ))=R\frac(k^2)(4)\sqrt(4+(sin)^2 \frac(kt)(2))$
задачи за движение
Нека използваме уравнение (4) и вземем неговата производна по отношение на времето
В (8) за единични вектори има проекции на вектора на скоростта върху координатните оси
Проекциите на скоростта върху координатните оси се определят като първи производни по време на съответните координати.
Познавайки проекциите, можете да намерите величината на вектора и неговата посока
 ,
(10)
,
(10)
Определяне на скоростта по естествен метод
задачи за движение
Нека е дадена траекторията материална точкаи законът за промяна на криволинейната координата. Да предположим, при T 1 точка имаше  и координатата с 1 и при T 2 – координата с 2. По време на
и координатата с 1 и при T 2 – координата с 2. По време на
 координатата е увеличена
координатата е увеличена  , тогава средната скорост на точката
, тогава средната скорост на точката
 .
.
За да намерим скоростта в даден момент, нека отидем до границата
 ,
,
 .
(12)
.
(12)
Векторът на скоростта на точка в естествения начин за определяне на движението се определя като първата производна по време на криволинейната координата.
Точково ускорение
Под ускорението на материална точкаразбиране на векторно количество, което характеризира скоростта на промяна на вектора на скоростта на точка по величина и посока във времето.
Ускоряване на точка с помощта на векторния метод за определяне на движение
Разгледайте точка в две точки във времето T 1
( ) И T 2
(
) И T 2
( ), Тогава
), Тогава  - увеличаване на времето,
- увеличаване на времето,  - увеличение на скоростта.
- увеличение на скоростта.
вектор  винаги лежи в равнината на движение и е насочена към вдлъбнатината на траекторията.
винаги лежи в равнината на движение и е насочена към вдлъбнатината на траекторията.
П 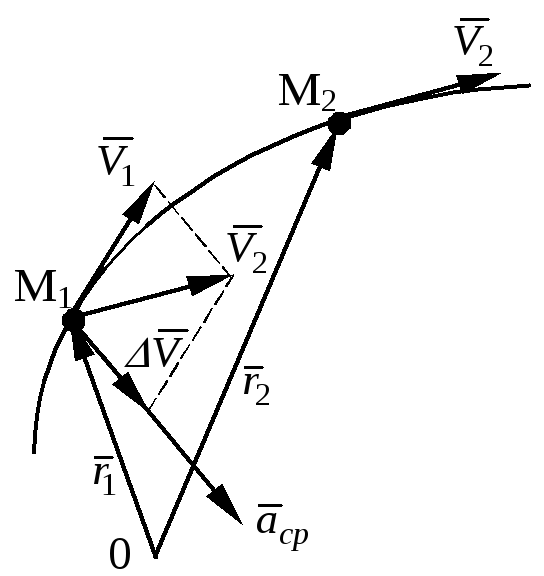 од средно ускорение на точкапо време на
T
разберете величината
од средно ускорение на точкапо време на
T
разберете величината
 .
(13)
.
(13)
За да намерим ускорението в даден момент, нека отидем до границата
 ,
,
 .
(14)
.
(14)
Ускорението на точка в даден момент се определя като втората производна по отношение на времето на радиус вектора на точката или първата производна на вектора на скоростта по отношение на времето.
Векторът на ускорението се намира в контактната равнина и е насочен към вдлъбнатината на траекторията.
Ускорение на точка с координатния метод за определяне на движение
Нека използваме уравнението за връзката между векторния и координатния метод за определяне на движението
И нека вземем втората производна от него
 ,
,
 .
(15)
.
(15)
В уравнение (15) за единични вектори има проекции на вектора на ускорението върху координатните оси
 .
(16)
.
(16)
Проекциите на ускорението върху координатните оси се определят като първите производни по отношение на времето от проекциите на скоростта или като вторите производни на съответните координати по отношение на времето.
Големината и посоката на вектора на ускорението могат да бъдат намерени с помощта на следните изрази
 ,
(17)
,
(17)
 ,
,
 ,
, .
(18)
.
(18)
Ускоряване на точка с помощта на естествения метод за определяне на движението
П  Нека точката се движи по извита траектория. Нека разгледаме двете му позиции в моменти от време T
(с, М, v) И T 1
(с 1, М 1, v 1).
Нека точката се движи по извита траектория. Нека разгледаме двете му позиции в моменти от време T
(с, М, v) И T 1
(с 1, М 1, v 1).
В този случай ускорението се определя чрез неговите проекции върху осите на естествената координатна система, движеща се заедно с точката М. Осите са насочени, както следва:
М - допирателна, насочена по допирателната към траекторията, към положителното еталонно разстояние,
М н– главната нормала, насочена по нормалата, лежаща в контактната равнина, и насочена към вдлъбнатината на траекторията,
М b– бинормална, перпендикулярна на равнина M ни образува дясна тройка с първите оси.
Тъй като векторът на ускорението лежи в равнината на допир, тогава а b = 0. Нека намерим проекциите на ускорението върху другите оси.
 .
(19)
.
(19)
Нека проектираме (19) върху координатните оси
 ,
(20)
,
(20)
 .
(21)
.
(21)
Нека начертаем през точка M 1 оси, успоредни на осите в точка M, и намерим проекциите на скоростта:
Където - така нареченият ъгъл на съседство.
Заместете (22) в (20)
 .
.
При T 0 0, cos 1 тогава

 .
(23)
.
(23)
Тангенциалното ускорение на точка се определя от първата производна по време на скоростта или втората производна по време на криволинейната координата.
Тангенциалното ускорение характеризира промяната на вектора на скоростта по големина.
Нека заместим (22) в (21)
 .
.
Умножете числителя и знаменателя по sза да получите известни граници
Където  (първата прекрасна граница),
(първата прекрасна граница),
 ,
, ,
,
 , Където
- радиус на кривина на траекторията.
, Където
- радиус на кривина на траекторията.
Замествайки изчислените граници в (24), получаваме
 .
(25)
.
(25)
Нормалното ускорение на точка се определя от отношението на квадрата на скоростта към радиуса на кривината на траекторията в дадена точка.
Нормалното ускорение характеризира промяната на вектора на скоростта по посока и винаги е насочено към вдлъбнатината на траекторията.
Накрая получаваме проекциите на ускорението на материалната точка върху оста на естествената координатна система и големината на вектора

 ,
(26)
,
(26)
 .
(27)
.
(27)
Формули за изчисляване на скоростта на точка, ускорение, радиус на кривина на траектория, тангенс, нормала и бинормал от дадени координати спрямо времето. Пример за решаване на задача, в която дадени уравнениядвижение, трябва да определите скоростта и ускорението на точката. Определят се и радиусът на кривината на траекторията, допирателната, нормалната и бинормална.
СъдържаниеВъведение
Изводите от формулите по-долу и представянето на теорията са дадени на страницата “Кинематика на материална точка”. Тук ще приложим основните резултати от тази теория към координатния метод за определяне на движението на материална точка.
Нека имаме фиксирана правоъгълна координатна система с център в фиксирана точка. В този случай позицията на точка M се определя еднозначно от нейните координати (x, y, z). Координатен метод за определяне на движението на точка- това е метод, при който се посочва зависимостта на координатите от времето. Тоест, определени са три функции на времето (за триизмерно движение):
Определяне на кинематични величини
Познавайки зависимостта на координатите от времето, ние автоматично определяме радиуса на вектора на материалната точка M по формулата:
,
където са единични вектори (ортове) по посока на осите x, y, z.
Диференцирайки по време, намираме проекциите на скоростта и ускорението върху координатните оси:
;
;
Модули за скорост и ускорение:
;
.
.
Тангенциалното (тангенциалното) ускорение е проекцията на общото ускорение върху посоката на скоростта:
.
Тангенциален (тангенциален) вектор на ускорение:
Нормално ускорение:
.
;
.
Единичен вектор по посока на главната нормала на траекторията:
.
Радиус на кривината на траекторията:
.
Център на кривината на траекторията:
.
.
Пример за решение на проблем
Определяне на скоростта и ускорението на точка чрез дадените уравнения на нейното движение
Използвайки дадените уравнения за движение на точка, установете вида на нейната траектория и за момент намерете позицията на точката върху траекторията, нейната скорост, пълно, тангенциално и нормално ускорение, както и радиуса на кривина на траекторията.
Уравнения на движение на точка:
, см;
, см.
Решение
Определяне на вида на траекторията
Изключваме времето от уравненията на движението. За да направите това, ние ги пренаписваме във формата:
;
.
Нека приложим формулата:
.
;
;
;
.
И така, получихме уравнението на траекторията:
.
Това е уравнението на парабола с връх в точка и ос на симетрия.
Тъй като
, Че
; или
.
По подобен начин получаваме ограничение за координатата:
;
;
Така траекторията на движението на точката е дъгата на парабола
,
намира се в
И .
Изграждаме парабола от точки.
| 0 | 6 |
| 3 | 5,625 |
| 6 | 4,5 |
| 9 | 2,625 |
| 12 | 0 |
Определяме позицията на точката в момента.
;
.
Определяне на скоростта на точка
Диференцирайки координатите и по време, намираме компонентите на скоростта.
.
За разграничаване е удобно да се приложи тригонометричната формула:
. Тогава
;
.
Изчисляваме стойностите на компонентите на скоростта в момента:
;
.
Модул за скорост:
.
Определяне на ускорението на точка
Разграничавайки компонентите на скоростта и времето, намираме компонентите на ускорението на точката.
;
.
Изчисляваме стойностите на компонентите на ускорението в момента:
;
.
Модул за ускоряване:
.
Тангенциалното ускорение е проекцията на общото ускорение върху посоката на скоростта:
.
Тъй като векторът на тангенциалното ускорение е насочен срещу скоростта.
Нормално ускорение:
.
Векторът и е насочен към центъра на кривината на траекторията.
Радиус на кривината на траекторията:
.
Траекторията на точка е дъгата на парабола
;
.
Точкова скорост: .
Точково ускорение: ; ; .
Радиус на кривина на траекторията: .
Определяне на други количества
При решаването на проблема открихме:
векторен и скоростен модул:
;
;
вектор и модул на пълното ускорение:
;
;
тангенциално и нормално ускорение:
;
;
радиус на кривината на траекторията: .
Нека да определим останалите количества.
Единичен вектор в допирателната посока към пътя:
.
Вектор на тангенциалното ускорение:
.
Вектор на нормално ускорение:
.
Единичен вектор по посока на главната нормала:
.
Координати на центъра на кривината на траекторията:
.
Нека въведем третата ос на координатната система, перпендикулярна на осите и . В триизмерна система
;
.
Единичен вектор в бинормална посока:
.









