Наведено завдання для розрахунково-аналітичних та розрахунково-графічних робіт з усіх розділів курсу технічної механіки. Кожне завдання включає опис розв'язання задач з короткими методичними вказівками, наведено приклади розв'язання. Додатки містять необхідний довідковий матеріал. Для студентів будівельних спеціальностей середніх професійних навчальних закладів.
Визначення реакцій ідеальних зв'язків аналітичним способом.
1. Зазначають точку, рівновагу якої розглядається. У завданнях для самостійної роботитакою точкою є центр тяжкості тіла або точка перетину всіх стрижнів та ниток.
2. Прикладають до цієї точки активні сили. У завданнях для самостійної роботи активними силами є власна вага тіла або вага вантажу, які спрямовані вниз (правильніше – до центру тяжіння землі). За наявності блоку вага вантажу діє на розглянуту точку вздовж нитки. Напрямок дії цієї сили встановлюється із креслення. Вагу тіла прийнято позначати літерою G.
3. Подумки відкидають зв'язки, замінюючи їхню дію реакціями зв'язків. У пропонованих задачах використовуються три види зв'язків - ідеально гладка площина, ідеально жорсткі прямолінійні стрижні та ідеально гнучкі нитки, - надалі іменовані відповідно площиною, стрижнем і ниткою.
ЗМІСТ
Передмова
Розділ I. Самостійні та контрольні роботи
Розділ 1. Теоретична механіка. Статика
1.1. Визначення реакцій ідеальних зв'язків аналітичним способом
1.2. Визначення опорних реакцій балки на двох опорах під час дії вертикальних навантажень
1.3. Визначення положення центру тяжкості перерізу
Глава 2. Опір матеріалів
2.1. Підбір перерізів стрижнів з розрахунку на міцність
2.2. Визначення основних центральних моментів інерції перерізу
2.3. Побудова епюр поперечних сил та згинальних моментів для простої балки
2.4. Визначення допустимого значення центрально-стискаючої сили
Глава 3. Статика споруд
3.1. Побудова епюр внутрішніх зусиль для найпростішої одноконтурної рами
3.2. Графічне визначення зусиль у стрижнях ферми побудовою діаграми Максвелла-Кремони
3.3. Визначення лінійних переміщень у найпростіших консольних рамах
3.4. Розрахунок статично невизначеної (нерозрізної) балки за рівнянням трьох моментів
Розділ ІІ. Розрахунково-графічні роботи
Розділ 4. Теоретична механіка. Статика
4.1. Визначення зусиль у стрижнях найпростішої консольної ферми
4.2. Визначення опорних реакцій балки на двох опорах
4.3. Визначення положення центру тяжкості перерізу
Глава 5. Опір матеріалів
5.1. Визначення зусиль у стрижнях статично невизначеної системи
5.2. Визначення основних моментів інерції перерізу
5.3. Підбір перерізу балки із прокатного двотавра
5.4. Підбір перерізу центрально-стиснутої складової стійки
Глава 6. Статика споруд
6.1. Визначення зусиль у перерізах тришарнірної арки
6.2. Графічне визначення зусиль у стрижнях плоскої ферми побудовою діаграми Максвелла - Кремони
6.3. Розрахунок статично невизначеної рами
6.4. Розрахунок нерозрізної балки за рівнянням трьох моментів
Програми
Список літератури.
Безкоштовно завантажити електронну книгу у зручному форматі, дивитися та читати:
Скачати книгу Збірник завдань з технічної механіки, Сєтков В.І., 2003 - fileskachat.com, швидке і безкоштовне скачування.
Завантажити pdf
Нижче можна купити цю книгу за найкращою ціною зі знижкою з доставкою по всій Росії.
Багато студентів вузів стикаються з певними труднощами, коли в їхньому курсі навчання починають викладати базові технічні дисципліни, такі як опір матеріалів та теоретичну механіку. У цій статті буде розглянуто один із таких предметів – так звана технічна механіка.
Технічна механіка - це наука, що вивчає різні механізми, їх синтез та аналіз. Насправді це означає поєднання трьох дисциплін – опору матеріалів, теоретичної механіки і деталей машин. Вона зручна тим, що кожен навчальний заклад вибирає, у якій пропорції викладатиме ці курси.
Відповідно, у більшості контрольних робітЗавдання розбиті на три блоки, які необхідно вирішувати окремо або разом. Розглянемо найпоширеніші завдання.
Розділ перший. Теоретична механіка
З усього різноманіття завдань з теормеху найчастіше можна зустріти завдання з розділу кінематики та статики. Це завдання на рівновагу плоскої рами, визначення законів руху тіл та кінематичний аналіз важільного механізму.
Для вирішення задач на рівновагу плоскої рами необхідно скористатися рівнянням рівноваги плоскої системи сил:
![]()
Сума проекцій усіх сил на координатні осі дорівнює нулю та сума моментів усіх сил щодо будь-якої точки дорівнює нулю. Вирішуючи разом ці рівняння, визначаємо величину реакцій всіх опор плоскої рами.
У задачах визначення основних кінематичних параметрів руху тіл необхідно, виходячи із заданої траєкторії чи закону руху матеріальної точки, Визначити її швидкість, прискорення (повне, дотичне і нормальне) і радіус кривизни траєкторії. Закони руху точки задані рівняннями траєкторії:
Проекції швидкості точки на координатні осі знаходяться шляхом диференціювання відповідних рівнянь:
![]()
Диференціюючи рівняння швидкості, знаходимо проекції прискорення точки. Стосовне та нормальне прискорення, радіус кривизни траєкторії знаходимо графічним або аналітичним шляхом:
![]()
![]()
Кінематичний аналіз важільного механізму проводиться за такою схемою:
- Розбиття механізму на групи Ассура
- Побудова для кожної з груп планів швидкостей та прискорень
- Визначення швидкостей та прискорень усіх ланок та точок механізму.
Розділ другий. Опір матеріалів
Опір матеріалів – досить складний розуміння розділ, з безліччю усіляких завдань, більшість із яких вирішується за своєю методикою. З метою спростити студентам їх вирішення найчастіше в курсі прикладної механіки дають елементарні завдання на простий опір конструкцій – причому вигляд і матеріал конструкції, як правило, залежить від профілю вузу.
Найпоширенішими є завдання на розтягування-стиск, на вигин та на кручення.
У завданнях на розтягування-стиск необхідно побудувати епюри поздовжніх зусиль і нормальних напруг, а іноді ще й переміщень ділянок конструкції.
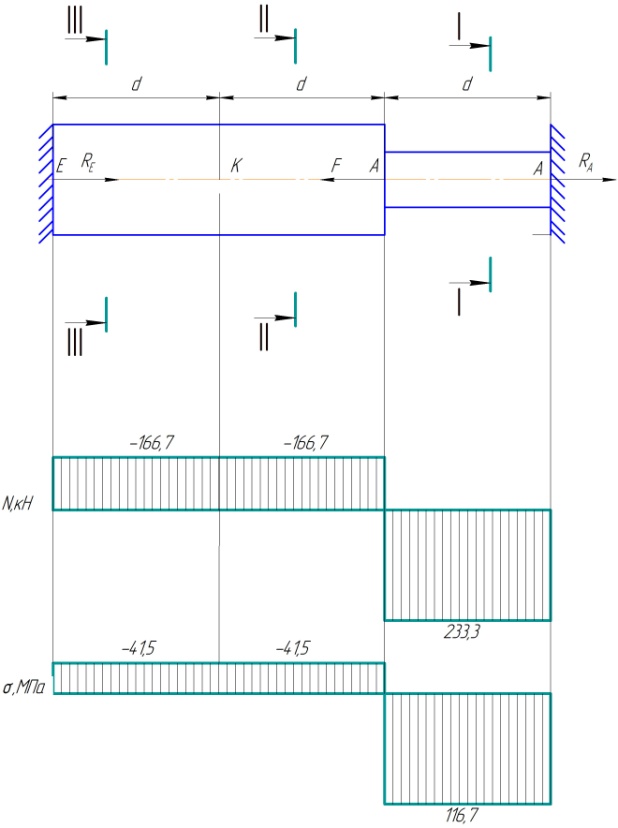
Для цього необхідно розбити конструкцію на ділянки, межами яких будуть місця, в яких прикладено навантаження або змінюється площа поперечного перерізу. Далі, застосовуючи формули рівноваги твердого тіла, Визначаємо величини внутрішніх зусиль на межах ділянок, і, з урахуванням площі поперечного перерізу, внутрішні напруги.
За отриманими даними будуємо графіки - епюри, приймаючи за вісь графіка вісь симетрії конструкції.
Завдання на кручення подібні до завдань на вигин, за винятком того, що замість зусиль, що розтягують, до тіла прикладені крутні моменти. З урахуванням цього необхідно повторити етапи розрахунку - розбиття на ділянки, визначення моментів, що закручують, і кутів закручування і побудова епюр.
У завданнях на вигин необхідно розрахувати та визначити поперечні сили та згинальні моменти для навантаженого бруса.
Спочатку визначаються реакції опор, у яких закріплений брус. Для цього потрібно записати рівняння рівноваги конструкції з урахуванням усіх зусиль, що діють.
Після цього брус розбивається на ділянки, межами яких будуть точити застосування зовнішніх сил. Шляхом розгляду рівноваги кожної ділянки окремо визначаються поперечні сили та згинальні моменти на межах ділянок. За отриманими даними будуються епюри.
Перевірка поперечного перерізу на міцність проводиться так:
- Визначається місце розташування небезпечного перерізу – перерізу, де діятимуть найбільші згинальні моменти.
- З умови міцності при згинанні визначається момент опору поперечного перерізу бруса.
- Визначається характерний розмір перерізу – діаметр, довжина сторони чи номер профілю.
Розділ третій. Деталі машин
Розділ «Деталі машин» поєднує в собі всі завдання на розрахунок механізмів, що працюють у реальних умовах – це може бути привод конвеєра або зубчаста передача. Істотно полегшує завдання те, що це формули і методи розрахунку наведено у довідниках, і студенту необхідно лише вибрати ті, які підходять для заданого механізму.
Література
- Теоретична механіка: Методичні вказівкиі контрольні завданнядля студентів-заочників машинобудівних, будівельних, транспортних, приладобудівних спеціальностей вищих навчальних закладів/Под ред. проф. С.М.Тарга, - М.: вища школа, 1989 Видання четверте;
- А. В. Дарков, Г. С. Шпіро. "Опір матеріалів";
- Чернавський С.А. Курсове проектування деталей машин: Навч. посібник для учнів машинобудівних спеціальностей технікумів / С. А. Чернавський, К. Н. Боков, І. М. Чернін та ін. - 2-ге вид., перероб. та дод. - М. Машинобудування, 1988. - 416 с.: Іл.
Рішення технічної механіки на замовлення
Наша компанія також пропонує послуги з вирішення завдань та контрольних робіт з механіки. Якщо у вас є труднощі з розумінням цього предмета, ви завжди можете замовити докладне рішенняу нас. Ми беремося за складні завдання!
можна безкоштовно.
Кінематика
Кінематика матеріальної точки
Визначення швидкості та прискорення точки по заданим рівняннямїї руху
Дано: Рівняння руху точки: x = 12 sin(πt/6), см; y = 6 cos 2 (πt/6), Див.
Встановити вид її траєкторії та для моменту часу t = 1 сзнайти положення точки на траєкторії, її швидкість, повне, дотичне та нормальне прискорення, а також радіус кривизни траєкторії.
Поступальний та обертальний рух твердого тіла

Дано:
t = 2; r 1 = 2 см, R 1 = 4 см; r 2 = 6 см, R 2 = 8 см; r 3 = 12 см, R 3 = 16 см; s 5 = t 3 – 6t (см).
Визначити у час t = 2 швидкості точок A, C; кутове прискоренняколеса 3; прискорення точки B та прискорення рейки 4.
Кінематичний аналіз плоского механізму

Дано:
R 1 , R 2 , L, AB, ω 1 .
Знайти: ω 2 .

Плоский механізм складається з стрижнів 1, 2, 3, 4 та повзуна E. Стрижні з'єднані за допомогою циліндричних шарнірів. Точка D розташована у середині стрижня AB.
Дано: ω 1 , ε 1 .
Знайти: швидкості V A , V B , V D і V E; кутові швидкості 2, 3 і 4; прискорення a B; кутове прискорення ε AB ланки AB; положення миттєвих центрів швидкостей P 2 і P 3 ланок 2 та 3 механізму.
Визначення абсолютної швидкості та абсолютного прискорення точки

Прямокутна пластина обертається навколо нерухомої осі згідно із законом φ = 6 t 2 - 3 t 3. Позитивний напрямок відліку кута показано на малюнках дуговою стрілкою. Вісь обертання OO 1 лежить у площині пластини (пластина обертається у просторі).
По пластині вздовж прямої BD рухається точка M. Задано закон її відносного руху, тобто залежність s = AM = 40(t - 2 t 3) - 40(s – у сантиметрах, t – у секундах). Відстань b = 20 см. На малюнку точка M показана у положенні, у якому s = AM > 0 (при s< 0 точка M знаходиться з іншого боку від точки A).
Знайти абсолютну швидкість та абсолютне прискорення точки M у момент часу t 1 = 1 с.
Динаміка
Інтегрування диференціальних рівнянь руху матеріальної точки, що під дією змінних сил
Вантаж D масою m, отримавши в точці A початкову швидкість V 0 рухається в вигнутій трубі ABC, розташованої у вертикальній площині. На ділянці AB, довжина якого l, на вантаж діє постійна сила T (її напрямок показано на малюнку) і сила R опору середовища (модуль цієї сили R = μV 2 вектор R направлений протилежно швидкості V вантажу).
Вантаж, закінчивши рух ділянці AB, у точці B труби, не змінюючи значення модуля своєї швидкості, перетворюється на ділянку BC. На ділянці BC на вантаж діє змінна сила F, проекція F x якої вісь x задана.
Вважаючи вантаж матеріальною точкою, визначити закон його руху дільниці BC, тобто. x = f(t) де x = BD. Тертям вантажу об трубу знехтувати.

Завантажити розв'язання задачі
Теорема про зміну кінетичної енергії механічної системи
Механічна система складається з вантажів 1 і 2, циліндричного котка 3, двоступінчастих шківів 4 і 5. Тіла системи з'єднані нитками, намотаними на шківи; ділянки ниток паралельні відповідним площинам. Ковзанка (суцільний однорідний циліндр) котиться по опорній площині без ковзання. Радіуси щаблів шківів 4 і 5 рівні відповідно R 4 = 0,3 м, r 4 = 0,1 м, R 5 = 0,2 м, r 5 = 0,1 м. Масу кожного шківа вважати рівномірно розподіленою за його зовнішнім обідом . Опорні площини вантажів 1 і 2 шорсткі, коефіцієнт тертя ковзання кожного вантажу f = 0.1.
Під дією сили F, модуль якої змінюється за законом F = F(s), де s - переміщення точки її застосування, система починає рухатися зі стану спокою. При русі системи на шків 5 діють сили опору, момент яких щодо осі обертання постійний і дорівнює M 5 .
Визначити значення кутової швидкості шківа 4 у той час, коли переміщення s точки докладання сили F дорівнюватиме s 1 = 1,2 м. 
Завантажити розв'язання задачі
Застосування загального рівняння динаміки до дослідження руху механічної системи
Для механічної системи визначити лінійне прискорення a1. Вважати, що з блоків і котків маси розподілені по зовнішньому радіусу. Троси та ремені вважати невагомими та нерозтяжними; прослизання відсутнє. Тертям кочення і тертям ковзання знехтувати. 
Завантажити розв'язання задачі
Застосування принципу Даламбера до визначення реакцій опор тіла, що обертається
Вертикальний вал AK, що обертається рівномірно з кутовою швидкістю ω = 10 -1 , закріплений підп'ятником в точці A і циліндричним підшипником в точці D.
До валу жорстко прикріплено невагомий стрижень 1 довжиною l 1 = 0,3 м, на вільному кінці якого розташований вантаж масою m 1 = 4 кг, і однорідний стрижень 2 довжиною l 2 = 0,6 м, що має масу m 2 = 8 кг. Обидва стрижні лежать в одній вертикальній площині. Точки прикріплення стрижнів до валу, а також кути α та β вказані у таблиці. Розміри AB = BD = DE = EK = b, де b = 0,4 м. Вантаж прийняти за матеріальну точку.
Нехтуючи масою валу, визначити реакції підп'ятника та підшипника.

Теоретична механіка– це розділ механіки, у якому викладаються основні закони механічного руху та механічної взаємодії матеріальних тіл.
Теоретична механіка є наукою, у якій вивчаються переміщення тіл із часом (механічні руху). Вона є базою інших розділів механіки (теорія пружності, опір матеріалів, теорія пластичності, теорія механізмів і машин, гідроаеродинаміка) та багатьох технічних дисциплін.
Механічне рух— це зміна з часом взаємного становища у просторі матеріальних тел.
Механічне взаємодія- Це така взаємодія, в результаті якої змінюється механічний рух або змінюється взаємне положення частин тіла.
Статика твердого тіла
Статика— це розділ теоретичної механіки, в якому розглядаються завдання на рівновагу твердих тіл та перетворення однієї системи сил на іншу, їй еквівалентну.
- Основні поняття та закони статики
- Абсолютно тверде тіло(тверде тіло, тіло) – це матеріальне тіло, відстань між будь-якими точками у якому змінюється.
- Матеріальна точка- Це тіло, розмірами якого за умовами завдання можна знехтувати.
- Вільне тіло- Це тіло, на переміщення якого не накладено жодних обмежень.
- Невільне (пов'язане) тіло- Це тіло, на переміщення якого накладені обмеження.
- Зв'язки– це тіла, що перешкоджають переміщенню об'єкта, що розглядається (тіла або системи тіл).
- Реакція зв'язку- Це сила, що характеризує дію зв'язку на тверде тіло. Якщо вважати силу, з якою тверде тіло діє зв'язок, дією, то реакція зв'язку є протидією. При цьому сила - дія прикладена до зв'язку, а реакція зв'язку додається до твердого тіла.
- Механічна система– це сукупність взаємозалежних між собою тіл чи матеріальних точок.
- Тверде тіломожна розглядати як механічну систему, положення та відстань між точками якої не змінюються.
- Сила- Це векторна величина, що характеризує механічну дію одного матеріального тіла на інше.
Сила як вектор характеризується точкою застосування, напрямом дії та абсолютним значенням. Одиниця виміру модуля сили – Ньютон. - Лінія дії сили- Це пряма, вздовж якої спрямований вектор сили.
- Зосереджена сила- Сила, прикладена в одній точці.
- Розподілені сили (розподілене навантаження)- Це сили, що діють на всі точки об'єму, поверхні або довжини тіла.
Розподілене навантаження задається силою, що діє на одиницю об'єму (поверхні, довжини).
Розмірність розподіленого навантаження - Н/м3 (Н/м2, Н/м). - Зовнішня сила– це сила, що діє з боку тіла, що не належить механічній системі, що розглядається.
- Внутрішня сила- Це сила, що діє на матеріальну точку механічної системи з боку іншої матеріальної точки, що належить системі, що розглядається.
- Система сил– це сукупність сил, які діють механічну систему.
- Плоска система сил- Це система сил, лінії дії яких лежать в одній площині.
- Просторова система сил- Це система сил, лінії дії яких не лежать в одній площині.
- Система схожих сил- Це система сил, лінії дії яких перетинаються в одній точці.
- Довільна система сил- Це система сил, лінії дії яких не перетинаються в одній точці.
- Еквівалентні системи сил- Це такі системи сил, заміна яких одна на іншу не змінює механічного стану тіла.
Прийняте позначення: . - Рівновага- Це стан, при якому тіло при дії сил залишається нерухомим або рухається рівномірно прямолінійно.
- Врівноважена система сил- Це система сил, яка додана до вільного твердого тіла не змінює його механічного стану (не виводить з рівноваги).
 .
. - Рівночинна сила- Це сила, дія якої на тіло еквівалентна дії системи сил.
 .
. - Момент сили- Це величина, що характеризує обертову здатність сили.
- Пара сил- Це система двох паралельних рівних по модулю протилежно спрямованих сил.
Прийняте позначення: .
Під дією пари сил тіло здійснюватиме обертальний рух. - Проекція сили на вісь– це відрізок, укладений між перпендикулярами, проведеними з початку та кінця вектора сили до цієї осі.
Проекція позитивна, якщо напрямок відрізка збігається з позитивним напрямком осі. - Проекція сили на площину– це вектор на площині, укладений між перпендикулярами, проведеними з початку та кінця вектора сили до цієї площини.
- Закон 1 (закон інерції).Ізольована матеріальна точка перебуває у спокої чи рухається поступово і прямолінійно.
Рівномірний та прямолінійний рух матеріальної точки є рухом за інерцією. Під станом рівноваги матеріальної точки і твердого тіла розуміють як стан спокою, а й рух за інерцією. Для твердого тіла існують різні види руху за інерцією, наприклад, рівномірне обертання твердого тіла навколо нерухомої осі. - Закон 2.Тверде тіло знаходиться в рівновазі під дією двох сил тільки в тому випадку, якщо ці сили дорівнюють модулю і направлені в протилежні сторони по загальній лінії дії.
Ці дві сили називаються такими, що врівноважуються.
Взагалі сили називаються такими, що врівноважуються, якщо тверде тіло, до якого прикладені ці сили, перебуває в спокої. - Закон 3Не порушуючи стану (слово «стан» тут означає стан руху або спокою) твердого тіла, можна додавати і відкидати сили, що врівноважуються.
Слідство. Не порушуючи стану твердого тіла, силу можна переносити по лінії дії в будь-яку точку тіла.
Дві системи сил називаються еквівалентними, якщо одну з них можна замінити іншою, не порушуючи стану твердого тіла. - Закон 4.Рівночинна двох сил, прикладених в одній точці, прикладена в тій же точці, що дорівнює по модулю діагоналі паралелограма, побудованого на цих силах, і спрямована вздовж цієї
діагоналі.
По модулю рівнодіюча дорівнює: - Закон 5 (закон рівності дії та протидії). Сили, з якими два тіла діють один на одного, рівні за модулем і направлені в протилежні сторони по одній прямій.
Слід мати на увазі, що дія- сила, прикладена до тіла Б, і протидія- сила, прикладена до тіла А, не врівноважуються, тому що вони прикладені до різних тіл. - Закон 6 (закон затвердіння). Рівновага нетвердого тіла не порушується при його затвердінні.
Не слід забувати, що умови рівноваги, які є необхідними і достатніми для твердого тіла, є необхідними, але недостатніми для відповідного нетвердого тіла. - Закон 7 (закон звільнення від зв'язків).Невільне тверде тіло можна як вільне, якщо його подумки звільнити від зв'язків, замінивши дію зв'язків відповідними реакціями зв'язків.
- Зв'язки та їх реакції
- Гладка поверхняобмежує переміщення нормалі до поверхні опори. Реакція спрямована перпендикулярно поверхні.
- Шарнірна рухлива опораобмежує рух тіла по нормалі до опорної площини. Реакція спрямована нормалі до поверхні опори.
- Шарнірна нерухома опора протидіє будь-якому переміщенню в площині перпендикулярної осі обертання.
- Шарнірний невагомий стриженьпротидіє переміщенню тіла вздовж лінії стрижня. Реакція буде спрямована вздовж лінії стрижня.
- Глуха закладкапротидіє будь-якому переміщенню та обертанню в площині. Її дію можна замінити силою, представленою у вигляді двох складових та парою сил з моментом.




Кінематика
Кінематика- Розділ теоретичної механіки, в якому розглядаються загальні геометричні властивості механічного руху, як процесу, що відбувається в просторі і в часі. Об'єкти, що рухаються, розглядають як геометричні точки або геометричні тіла.
- Основні поняття кінематики
- Закон руху точки (тіла)- Це залежність положення точки (тіла) у просторі від часу.
- Траєкторія точки– це геометричне місце положень точки у просторі під час її руху.
- Швидкість точки (тіла)– це характеристика зміни у часі положення точки (тіла) у просторі.
- Прискорення точки (тіла)– це характеристика зміни часу швидкості точки (тіла).
- Визначення кінематичних характеристик точки
- Траєкторія точки
У системі відліку траєкторія описується выражением: .
У координатній системі відліку траєкторія визначається за законом руху точки та описується виразами z = f(x, y)- у просторі, або y = f(x)– у площині.
У природній системі відліку траєкторія задається заздалегідь. - Визначення швидкості точки у векторній системі координат
При завданні руху точки у векторній системі координат відношення переміщення до інтервалу часу називають середнім значенням швидкості цього інтервалі часу: .
Приймаючи інтервал часу нескінченно малою величиною, набувають значення швидкості в даний момент часу (миттєве значення швидкості): .
.
Вектор середньої швидкості спрямований уздовж вектора у бік руху точки, вектор миттєвої швидкості спрямований по дотичній траєкторії в бік руху точки.
Висновок: швидкість точки - векторна величина, що дорівнює похідній від закону руху за часом.
Властивість похідної: похідна від будь-якої величини за часом визначає швидкість зміни цієї величини. - Визначення швидкості точки в координатній системі відліку
Швидкість зміни координат точки: .
.
Модуль повної швидкості точки при прямокутній системі координат дорівнюватиме: .
.
Напрямок вектора швидкості визначається косинусами напрямних кутів: ,
,
де - Кути між вектором швидкості і осями координат. - Визначення швидкості точки у природній системі відліку
Швидкість точки у природній системі відліку окреслюється похідна від закону руху точки: .
Згідно з попередніми висновками вектор швидкості спрямований по дотичній до траєкторії у бік руху точки і в осях визначається лише однією проекцією.
- Кінематика твердого тіла
- У кінематиці твердих тіл вирішуються дві основні задачі:
1) завдання руху та визначення кінематичних характеристик тіла в цілому;
2) визначення кінематичних характеристик точок тіла. - Поступальний рух твердого тіла
Поступальний рух - це рух, при якому пряма, проведена через дві точки тіла, залишається паралельною до її початкового положення.
Теорема: при поступальному русі всі точки тіла рухаються однаковими траєкторіями і мають у кожний момент часу однакові за модулем і напрямом швидкості та прискорення.
Висновок: поступальний рух твердого тіла визначається рухом будь-якої його точки, у зв'язку з чим завдання та вивчення його руху зводиться до кінематики точки. - Обертальний рух твердого тіла навколо нерухомої осі
Обертальний рух твердого тіла навколо нерухомої осі - це рух твердого тіла, при якому дві точки, що належать тілу, залишаються нерухомими протягом усього часу руху.
Положення тіла визначається кутом повороту. Одиниця виміру кута – радіан. (Радіан - центральний кут кола, довжина дуги якого дорівнює радіусу, повний кут кола містить 2πрадіана.)
Закон обертального руху тіла навколо нерухомої осі.
Кутову швидкість та кутове прискорення тіла визначимо методом диференціювання:
— кутова швидкість, Рад/с;
- Кутове прискорення, радий/с².
Якщо розсікти тіло площиною перпендикулярної осі, вибрати на осі обертання крапку Зта довільну точку М, то крапка Мбуде описувати навколо точки Зколо радіусу R. За час dtвідбувається елементарний поворот на кут, при цьому точка Мздійснить переміщення вздовж траєкторії на відстань .
.
Модуль лінійної швидкості: .
.
Прискорення точки Мпри відомій траєкторії визначається за його складовими: ,
,
де .
.
У результаті отримуємо формули
тангенціальне прискорення: ;
;
нормальне прискорення: .
.

Динаміка
Динаміка- це розділ теоретичної механіки, в якому вивчаються механічні рухиматеріальних тіл залежно від причин, що їх викликають.
- Основні поняття динаміки
- Інерційність- це властивість матеріальних тіл зберігати стан спокою або рівномірного прямолінійного руху, Поки зовнішні сили не змінять цього стану.
- Маса— це кількісний захід інерційності тіла. Одиниця виміру маси — кілограм (кг).
- Матеріальна точка- Це тіло, що володіє масою, розмірами якого при вирішенні цього завдання нехтують.
- Центр мас механічної системи- геометрична точка, координати якої визначаються формулами:
де m k , x k , y k , z k- Маса та координати k-тої точки механічної системи, m- Маса системи.
У однорідному полі тяжкості становище центру мас збігається із становищем центру тяжкості. - Момент інерції матеріального тіла щодо осі– це кількісна міра інертності при обертальному русі.
Момент інерції матеріальної точки щодо осі дорівнює добутку маси точки на квадрат відстані від осі: .
.
Момент інерції системи (тіла) щодо осі дорівнює арифметичній сумі моментів інерції всіх точок:
- Сила інерції матеріальної точки- це векторна величина, що дорівнює за модулем добутку маси точки на модуль прискорення і спрямована протилежно вектору прискорення:
- Сила інерції матеріального тіла- це векторна величина, що дорівнює за модулем добутку маси тіла на модуль прискорення центру мас тіла і спрямована протилежно вектору прискорення центру мас:
де - Прискорення центру мас тіла. - Елементарний імпульс сили- Це векторна величина , рівна добуткувектор сили на нескінченно малий проміжок часу dt:
.
Повний імпульс сили за Δt дорівнює інтегралу від елементарних імпульсів: .
. - Елементарна робота сили- це скалярна величина dA, рівна скалярному прої









