Dani su zadaci za računsko-analitički i računsko-grafički rad u svim dijelovima kolegija tehničke mehanike. Svaki zadatak sadrži opis načina rješavanja problema s kratkim metodičkim uputama, a navedeni su i primjeri rješenja. Prilozi sadrže potrebnu referentnu građu. Za studente srednjih strukovnih građevinskih specijalnosti obrazovne ustanove.
Određivanje reakcija idealnih veza analitičkom metodom.
1. Označite točku čija se ravnoteža razmatra. U zadacima za samostalan rad takva točka je težište tijela ili sjecište svih šipki i niti.
2. Aktivne sile djeluju na točku koja se razmatra. U zadacima za samostalan rad djelatne sile su vlastita težina tijela ili težina tereta koje su usmjerene prema dolje (točnije prema težištu zemlje). Ako postoji blok, težina tereta djeluje na predmetnu točku duž niti. Smjer djelovanja te sile određuje se iz crteža. Tjelesna težina obično se označava slovom G.
3. Mentalno odbacite veze, zamjenjujući njihovu akciju reakcijama veza. U predloženim problemima koriste se tri vrste veza - idealno glatka ravnina, idealno krute pravocrtne šipke i idealno fleksibilni navoji - u daljnjem tekstu ravnina, šipka i navoj.
SADRŽAJ
Predgovor
Odjeljak I. Samostalni i ispitni rad
Poglavlje 1. Teorijska mehanika. Statika
1.1. Analitičko određivanje reakcija idealne veze
1.2. Određivanje reakcija oslonca grede na dva oslonca pod djelovanjem vertikalnih opterećenja
1.3. Određivanje položaja težišta presjeka
Poglavlje 2. Čvrstoća materijala
2.1. Izbor poprečnih presjeka šipki prema čvrstoći
2.2. Određivanje glavnih središnjih momenata tromosti presjeka
2.3. Konstruiranje dijagrama posmičnih sila i momenata savijanja za prostu gredu
2.4. Određivanje dopuštene vrijednosti središnje tlačne sile
Poglavlje 3. Statika konstrukcija
3.1. Konstruiranje dijagrama unutarnjih sila za najjednostavniji jednokružni okvir
3.2. Grafičko određivanje sila u rešetkastim šipkama konstruiranjem Maxwell-Cremona dijagrama
3.3. Određivanje linearnih gibanja u najjednostavnijim konzolnim okvirima
3.4. Proračun statički neodređene (kontinuirane) grede pomoću jednadžbe tri momenta
Odjeljak II. Računski i grafički radovi
Poglavlje 4. Teorijska mehanika. Statika
4.1. Određivanje sila u štapovima najjednostavnije konzolne rešetke
4.2. Određivanje reakcija oslonca grede na dva oslonca
4.3. Određivanje položaja težišta presjeka
Poglavlje 5. Čvrstoća materijala
5.1. Određivanje sila u štapovima statički neodređenog sustava
5.2. Određivanje glavnih momenata tromosti presjeka
5.3. Odabir presjeka grede od valjane I-grede
5.4. Izbor poprečnog presjeka središnje kompozitnog regala
Poglavlje 6. Statika konstrukcija
6.1. Određivanje sila u presjecima trozglobnog luka
6.2. Grafičko određivanje sila u šipkama ravne rešetke konstruiranjem Maxwell-Cremona dijagrama
6.3. Proračun statički neodređenog okvira
6.4. Proračun kontinuirane grede pomoću jednadžbe tri momenta
Prijave
Bibliografija.
Besplatno preuzmite e-knjigu u prikladnom formatu, gledajte i čitajte:
Preuzmite knjigu Zbirka zadataka iz tehničke mehanike, V. I. Setkov, 2003 - fileskachat.com, brzo i besplatno preuzimanje.
Preuzmite pdf
U nastavku možete kupiti ovu knjigu po najpovoljnijoj cijeni uz popust s dostavom u cijeloj Rusiji.
Mnogi studenti sveučilišta suočavaju se s određenim poteškoćama kada njihov kolegij počne podučavati osnove tehničke discipline kao što su čvrstoća materijala i teorijska mehanika. Ovaj članak govori o jednom od tih predmeta - tzv. tehničkoj mehanici.
Tehnička mehanika je znanost koja proučava različite mehanizme, njihovu sintezu i analizu. U praksi to znači spajanje triju disciplina - čvrstoća materijala, teorijske mehanike i strojnih dijelova. Pogodno je jer svaka obrazovna ustanova sama bira u kojem će omjeru predavati te kolegije.
Sukladno tome, u većini testovi zadaci su podijeljeni u tri bloka koji se rješavaju zasebno ili zajedno. Pogledajmo najčešće zadatke.
Prvi odjeljak. Teorijska mehanika
U nizu zadataka teorijske mehanike najčešće se mogu naći zadaci iz dijela kinematike i statike. To su zadaci ravnoteže ravnog okvira, određivanja zakona gibanja tijela i kinematičke analize polužnog mehanizma.
Za rješavanje problema o ravnoteži ravnog okvira potrebno je koristiti jednadžbu ravnoteže ravnotežnog sustava sila:
![]()
Zbroj projekcija svih sila na koordinatne osi jednak je nuli, a zbroj momenata svih sila u odnosu na bilo koju točku jednak je nuli. Rješavajući ove jednadžbe zajedno, određujemo veličinu reakcija svih nosača ravnog okvira.
U zadacima za određivanje osnovnih kinematičkih parametara gibanja tijela potrebno je na temelju zadane putanje ili zakona gibanja materijalna točka, odrediti njegovu brzinu, ubrzanje (ukupno, tangencijalno i normalno) i polumjer zakrivljenosti putanje. Zakoni gibanja točke dani su jednadžbama putanje:
Projekcije brzine točke na koordinatne osi nalaze se diferenciranjem odgovarajućih jednadžbi:
![]()
Diferenciranjem jednadžbi brzine nalazimo projekcije ubrzanja točke. Tangencijalna i normalna ubrzanja, polumjer zakrivljenosti putanje nalaze se grafički ili analitički:
![]()
![]()
Kinematička analiza mehanizma poluge provodi se prema sljedećoj shemi:
- Podjela mehanizma na Assur grupe
- Izrada planova brzine i ubrzanja za svaku grupu
- Određivanje brzina i ubrzanja svih karika i točaka mehanizma.
Odjeljak dva. Čvrstoća materijala
Čvrstoća materijala prilično je težak dio za razumijevanje, s mnogo različitih problema, od kojih se većina rješava vlastitim metodama. Kako bi studentima pojednostavili svoje rješenje, najčešće se na kolegiju primijenjene mehanike daju elementarni zadaci o jednostavnom otporu konstrukcija - a vrsta i materijal konstrukcije u pravilu ovisi o profilu fakulteta.
Najčešći zadaci su napetost-stlačenje, savijanje i torzija.
U vlačno-tlačnim problemima potrebno je konstruirati dijagrame uzdužnih sila i normalnih naprezanja, a ponekad i pomaka presjeka konstrukcije.
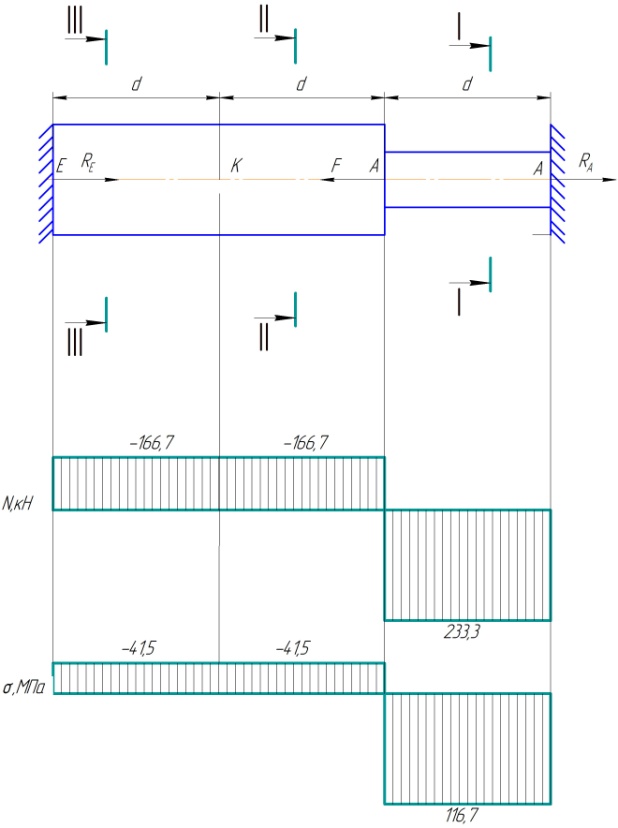
Da biste to učinili, potrebno je podijeliti strukturu na dijelove, čije će granice biti mjesta na kojima se primjenjuje opterećenje ili se mijenja površina poprečnog presjeka. Nadalje, korištenjem formula ravnoteže čvrsta, određujemo veličinu unutarnjih sila na granicama presjeka, a uzimajući u obzir površinu poprečnog presjeka, unutarnje naprezanja.
Na temelju dobivenih podataka konstruiramo grafove - dijagrame, uzimajući os simetrije konstrukcije kao os grafa.
Problemi uvijanja slični su problemima savijanja, osim što se umjesto vlačnih sila na tijelo primjenjuju momenti. Uzimajući to u obzir, potrebno je ponoviti faze proračuna - podjelu na presjeke, određivanje momenta i kutova uvijanja i konstruiranje dijagrama.
Kod problema savijanja potrebno je izračunati i odrediti posmične sile i momente savijanja za opterećenu gredu.
Prvo se određuju reakcije nosača u kojima je greda učvršćena. Da biste to učinili, morate napisati jednadžbe ravnoteže strukture, uzimajući u obzir sve djelujuće sile.
Nakon toga, greda je podijeljena na dijelove, čije će granice biti točke primjene vanjskih sila. Uzimajući u obzir ravnotežu svakog presjeka zasebno, određuju se posmične sile i momenti savijanja na granicama presjeka. Na temelju dobivenih podataka izrađuju se dijagrami.
Čvrstoća poprečnog presjeka se provjerava na sljedeći način:
- Određuje se mjesto opasnog presjeka - presjeka na kojem će djelovati najveći momenti savijanja.
- Iz uvjeta čvrstoće na savijanje određuje se moment otpora poprečnog presjeka grede.
- Određuje se karakteristična veličina presjeka - promjer, duljina stranice ili broj profila.
Treći dio. Dijelovi strojeva
Odjeljak "Dijelovi strojeva" objedinjuje sve zadatke za izračunavanje mehanizama koji rade u stvarnim uvjetima - to može biti pogon pokretne trake ili pogon zupčanika. Zadatak je uvelike pojednostavljen činjenicom da su sve formule i metode izračuna dane u referentnim knjigama, a učenik treba samo odabrati one koji su prikladni za određeni mehanizam.
Književnost
- Teorijska mehanika: Smjernice I kontrolni zadaci za izvanredne studente strojarstva, graditeljstva, prometa, izrade instrumenata na visokoškolskim ustanovama / Ed. prof. S.M. Targa, - M.: postdiplomske studije, 1989. Četvrto izdanje;
- A. V. Darkov, G. S. Shpiro. "Čvrstoća materijala";
- Chernavsky S.A. Dizajn kolegija strojnih dijelova: Proc. priručnik za studente strojarskih specijalnosti tehničkih škola / S. A. Chernavsky, K. N. Bokov, I. M. Chernin i drugi - 2. izdanje, revidirano. i dodatni - M. Strojarstvo, 1988. - 416 str.: ilustr.
Prilagođeno rješenje tehničke mehanike
Naša tvrtka nudi i usluge rješavanja problema i testova u mehanici. Ako imate poteškoća s razumijevanjem ove teme, uvijek možete naručiti detaljno rješenje imamo. Preuzimamo teške zadatke!
moguće je besplatno.
Kinematika
Kinematika materijalne točke
Određivanje brzine i ubrzanja točke po zadane jednadžbe njezine kretnje
Zadano je: Jednadžbe gibanja točke: x = 12 sin(πt/6), cm; y = 6 cos 2 (πt/6), cm.
Postavite vrstu njegove putanje za trenutak t = 1 s pronaći položaj točke na putanji, njezinu brzinu, ukupno, tangencijalno i normalno ubrzanje, kao i polumjer zakrivljenosti putanje.
Translatorno i rotacijsko gibanje krutog tijela

dano:
t = 2 s; r 1 = 2 cm, R 1 = 4 cm; r 2 = 6 cm, R 2 = 8 cm; r 3 = 12 cm, R 3 = 16 cm; s 5 = t 3 - 6t (cm).
Odredite u trenutku t = 2 brzine točaka A, C; kutno ubrzanje kotači 3; ubrzanje točke B i ubrzanje nosača 4.
Kinematička analiza ravnog mehanizma

dano:
R 1, R 2, L, AB, ω 1.
Pronađite: ω 2.

Ravni mehanizam se sastoji od šipki 1, 2, 3, 4 i klizača E. Šipke su spojene pomoću cilindričnih zglobova. Točka D nalazi se u sredini štapa AB.
Zadano je: ω 1, ε 1.
Nađi: brzine V A, V B, V D i V E; kutne brzine ω 2, ω 3 i ω 4; ubrzanje a B ; kutno ubrzanje ε AB karike AB; položaji centara trenutnih brzina P 2 i P 3 karika 2 i 3 mehanizma.
Određivanje apsolutne brzine i apsolutne akceleracije točke

Pravokutna ploča rotira oko sebe fiksna os prema zakonu φ = 6 t 2 - 3 t 3. Pozitivan smjer kuta φ prikazan je na slikama lučnom strelicom. Os rotacije OO 1 leži u ravnini ploče (ploča se okreće u prostoru).
Točka M se giba duž ploče po ravnoj liniji BD. Zadan je zakon njegovog relativnog gibanja, tj. ovisnost s = AM = 40 (t - 2 t 3) - 40(s - u centimetrima, t - u sekundama). Udaljenost b = 20 cm. Na slici je točka M prikazana u položaju gdje je s = AM > 0 (kod s< 0 točka M je s druge strane točke A).
Odredite apsolutnu brzinu i apsolutnu akceleraciju točke M u trenutku t 1 = 1 s.
Dinamika
Integracija diferencijalnih jednadžbi gibanja materijalne točke pod utjecajem promjenljivih sila
Opterećenje D s masom m, primljeno u točki A početna brzina V 0 se kreće u zakrivljenoj cijevi ABC koja se nalazi u vertikalnoj ravnini. U presjeku AB duljine l na teret djeluju stalna sila T (smjer joj je prikazan na slici) i sila srednjeg otpora R (modul te sile R = μV 2, vektor R usmjeren je suprotno od brzine V tereta).
Teret, nakon završetka kretanja u presjeku AB, u točki B cijevi, bez promjene vrijednosti modula brzine, prelazi na presjek BC. U presjeku BC na teret djeluje promjenljiva sila F čija je projekcija F x na os x dana.
Smatrajući teret materijalnom točkom, pronađite zakon njegovog gibanja u presjeku BC, tj. x = f(t), gdje je x = BD. Zanemarite trenje tereta o cijev.

Preuzmite rješenje problema
Teorem o promjeni kinetičke energije mehaničkog sustava
Mehanički sustav sastoji se od utega 1 i 2, cilindričnog valjka 3, dvostupanjskih remenica 4 i 5. Tijela sustava povezana su navojima namotanim na remenice; presjeci navoja su paralelni s odgovarajućim ravninama. Valjak (čvrsti homogeni cilindar) kotrlja se po nosivoj ravnini bez klizanja. Polumjeri stupnjeva remenica 4 i 5 jednaki su R 4 = 0,3 m, r 4 = 0,1 m, R 5 = 0,2 m, r 5 = 0,1 m. Smatra se da je masa svake remenice ravnomjerno raspoređena duž njegov vanjski rub. Noseće ravnine tereta 1 i 2 su hrapave, koeficijent trenja klizanja za svaki teret je f = 0,1.
Pod djelovanjem sile F, čiji se modul mijenja po zakonu F = F(s), gdje je s pomak točke njezina djelovanja, sustav se počinje pomicati iz stanja mirovanja. Pri gibanju sustava na remenicu 5 djeluju sile otpora, čiji je moment u odnosu na os rotacije konstantan i jednak M 5 .
Odredite vrijednost kutne brzine remenice 4 u trenutku kada pomak s točke primjene sile F postane jednak s 1 = 1,2 m. 
Preuzmite rješenje problema
Primjena opće jednadžbe dinamike na proučavanje gibanja mehaničkog sustava
Za mehanički sustav odredite linearno ubrzanje a 1 . Pretpostavimo da su mase blokova i valjaka raspoređene po vanjskom radijusu. Kablove i pojaseve treba smatrati bestežinskim i nerastezljivim; nema klizanja. Trenje kotrljanja i klizanja zanemariti. 
Preuzmite rješenje problema
Primjena d'Alembertova principa na određivanje reakcija oslonaca rotacijskog tijela
Vertikalno vratilo AK, koje jednoliko rotira kutnom brzinom ω = 10 s -1, učvršćeno je potisnim ležajem u točki A i cilindričnim ležajem u točki D.
Na osovinu su kruto pričvršćeni bestežinski štap 1 duljine l 1 = 0,3 m, na čijem se slobodnom kraju nalazi teret mase m 1 = 4 kg, i homogeni štap 2 duljine l 2 = 0,6 m, s masom m 2 = 8 kg. Oba štapa leže u istoj okomitoj ravnini. Točke pričvršćivanja šipki na osovinu, kao i kutovi α i β navedeni su u tablici. Mjere AB=BD=DE=EK=b, gdje je b = 0,4 m. Teret uzmite kao materijalnu točku.
Zanemarujući masu vratila, odrediti reakcije aksijalnog ležaja i ležaja.

Teorijska mehanika je dio mehanike koji izlaže osnovne zakone mehaničkog gibanja i mehaničkog međudjelovanja materijalnih tijela.
Teorijska mehanika je znanost koja proučava kretanje tijela u vremenu (mehanička gibanja). Služi kao osnova za druge grane mehanike (teorija elastičnosti, čvrstoća materijala, teorija plastičnosti, teorija mehanizama i strojeva, hidroaerodinamika) i mnoge tehničke discipline.
Mehaničko kretanje- ovo je promjena tijekom vremena relativnog položaja materijalnih tijela u prostoru.
Mehanička interakcija- ovo je interakcija uslijed koje se mijenja mehaničko kretanje ili se mijenja međusobni položaj dijelova tijela.
Statika krutog tijela
Statika je dio teorijske mehanike koji se bavi problemima ravnoteže čvrstih tijela i transformacije jednog sustava sila u drugi, njemu ekvivalentan.
- Osnovni pojmovi i zakoni statike
- Apsolutno kruto tijelo(čvrsto tijelo, tijelo) je materijalno tijelo, udaljenost između bilo koje točke u kojem se ne mijenja.
- Materijalna točka je tijelo čije se dimenzije, prema uvjetima zadatka, mogu zanemariti.
- Slobodno tijelo- ovo je tijelo čije kretanje nema ograničenja.
- Neslobodno (vezano) tijelo je tijelo čije je kretanje podložno ograničenjima.
- Veze– to su tijela koja sprječavaju kretanje dotičnog objekta (tijela ili sustava tijela).
- Reakcija komunikacije je sila koja karakterizira djelovanje veze na čvrsto tijelo. Ako silu kojom čvrsto tijelo djeluje na vezu smatramo akcijom, tada je reakcija veze reakcija. U ovom slučaju sila - djelovanje djeluje na spoj, a reakcija spoja na čvrsto tijelo.
- Mehanički sustav je skup međusobno povezanih tijela ili materijalnih točaka.
- Čvrsto može se smatrati mehaničkim sustavom čiji se položaji i udaljenosti između točaka ne mijenjaju.
- Sila je vektorska veličina koja karakterizira mehaničko djelovanje jednog materijalnog tijela na drugo.
Silu kao vektor karakterizira točka primjene, smjer djelovanja i apsolutna vrijednost. Jedinica za modul sile je Newton. - Linija djelovanja sile je pravac duž kojeg je usmjeren vektor sile.
- Fokusirana moć– sila primijenjena u jednoj točki.
- Distribuirane sile (raspodijeljeno opterećenje)- to su sile koje djeluju na sve točke volumena, površine ili dužine tijela.
Raspodijeljeno opterećenje određeno je silom koja djeluje po jedinici volumena (površina, duljina).
Dimenzija raspodijeljenog opterećenja je N/m 3 (N/m 2, N/m). - Vanjska sila je sila koja djeluje iz tijela koje ne pripada mehaničkom sustavu koji se razmatra.
- Unutarnja snaga je sila koja djeluje na materijalnu točku mehaničkog sustava iz druge materijalne točke koja pripada sustavu koji se razmatra.
- Sustav sila je skup sila koje djeluju na mehanički sustav.
- Ravni sustav sila je sustav sila čije linije djelovanja leže u istoj ravnini.
- Prostorni sustav sila je sustav sila čiji pravci djelovanja ne leže u istoj ravnini.
- Sustav konvergentnih sila je sustav sila čije se linije djelovanja sijeku u jednoj točki.
- Proizvoljni sustav sila je sustav sila čije se linije djelovanja ne sijeku u jednoj točki.
- Sustavi ekvivalentnih sila- to su sustavi sila čija zamjena jedna s drugom ne mijenja mehaničko stanje tijela.
Prihvaćena oznaka: . - Ravnoteža- to je stanje u kojem tijelo pod djelovanjem sila ostaje nepomično ili se giba jednoliko pravocrtno.
- Uravnoteženi sustav sila- ovo je sustav sila koji djelovanjem na slobodno čvrsto tijelo ne mijenja njegovo mehaničko stanje (ne izbacuje ga iz ravnoteže).
 .
. - Rezultantna sila je sila čije je djelovanje na tijelo ekvivalentno djelovanju sustava sila.
 .
. - Trenutak moći je veličina koja karakterizira rotacijsku sposobnost sile.
- Par sila je sustav dviju paralelnih sila jednake veličine i suprotno usmjerenih.
Prihvaćena oznaka: .
Pod utjecajem para sila tijelo će izvoditi rotacijsko gibanje. - Projekcija sile na os- ovo je segment zatvoren između okomica povučenih od početka i kraja vektora sile na ovu os.
Projekcija je pozitivna ako se smjer segmenta poklapa s pozitivnim smjerom osi. - Projekcija sile na ravninu je vektor na ravnini, zatvoren između okomica povučenih s početka i kraja vektora sile na tu ravninu.
- Zakon 1 (zakon inercije). Izolirana materijalna točka miruje ili se giba jednoliko i pravocrtno.
Jednoliko i pravocrtno gibanje materijalne točke je gibanje po inerciji. Stanje ravnoteže materijalne točke i krutog tijela shvaća se ne samo kao stanje mirovanja, već i kao gibanje po inerciji. Za kruto tijelo postoje različite vrste gibanja po inerciji, na primjer jednolika rotacija krutog tijela oko nepomične osi. - Zakon 2. Kruto tijelo je u ravnoteži pod djelovanjem dviju sila samo ako su te sile jednake po veličini i usmjerene u suprotnim smjerovima duž zajedničke linije djelovanja.
Ove dvije sile nazivaju se ravnotežom.
Općenito, sile se nazivaju uravnoteženima ako čvrsto tijelo na koje te sile djeluju miruje. - Zakon 3. Bez narušavanja stanja (riječ "stanje" ovdje označava stanje gibanja ili mirovanja) krutog tijela, mogu se dodavati i odbacivati sile ravnoteže.
Posljedica. Bez narušavanja stanja čvrstog tijela, sila se može prenijeti duž svoje linije djelovanja na bilo koju točku tijela.
Dva sustava sila nazivaju se ekvivalentnima ako se jedan od njih može zamijeniti drugim bez narušavanja stanja čvrstog tijela. - Zakon 4. Rezultanta dviju sila primijenjenih u jednoj točki, primijenjenih u istoj točki, jednaka je po veličini dijagonali paralelograma konstruiranog na tim silama i usmjerena je duž ove
dijagonale.
Apsolutna vrijednost rezultante je: - Zakon 5 (zakon jednakosti akcije i reakcije). Sile kojima dva tijela djeluju jedno na drugo jednake su veličine i usmjerene u suprotnim smjerovima duž iste ravne crte.
Treba imati na umu da akcijski- sila primijenjena na tijelo B, I protivljenje- sila primijenjena na tijelo A, nisu uravnoteženi, jer se primjenjuju na različita tijela. - Zakon 6 (zakon skrućivanja). Ravnoteža nečvrstog tijela nije poremećena kada se skrutne.
Ne treba zaboraviti da su uvjeti ravnoteže, koji su nužni i dovoljni za čvrsto tijelo, nužni, ali nedovoljni za odgovarajuće nečvrsto tijelo. - Zakon 7 (zakon emancipacije od veza). Neslobodno čvrsto tijelo može se smatrati slobodnim ako je mentalno oslobođeno veza, zamjenjujući djelovanje veza odgovarajućim reakcijama veza.
- Veze i njihove reakcije
- Glatka površina ograničava kretanje normalno na potpornu površinu. Reakcija je usmjerena okomito na površinu.
- Zglobni pokretni nosač ograničava kretanje tijela normalno na referentnu ravninu. Reakcija je usmjerena normalno na površinu nosača.
- Zglobni fiksni oslonac suprotstavlja se svakom gibanju u ravnini okomitoj na os rotacije.
- Zglobni bestežinski štap suprotstavlja se kretanju tijela duž linije štapa. Reakcija će biti usmjerena duž linije štapa.
- Slijepa brtva suprotstavlja se svakom kretanju i rotaciji u ravnini. Njegovo djelovanje može se zamijeniti silom predstavljenom u obliku dvije komponente i para sila s momentom.




Kinematika
Kinematika- dio teorijske mehanike koji ispituje opća geometrijska svojstva mehaničkog gibanja kao procesa koji se odvija u prostoru i vremenu. Objekti koji se kreću smatraju se geometrijskim točkama ili geometrijskim tijelima.
- Osnovni pojmovi kinematike
- Zakon gibanja točke (tijela)– to je ovisnost položaja točke (tijela) u prostoru o vremenu.
- Putanja točke– ovo je geometrijski položaj točke u prostoru tijekom njezina kretanja.
- Brzina točke (tijela)– to je karakteristika promjene u vremenu položaja točke (tijela) u prostoru.
- Ubrzanje točke (tijela)– to je karakteristika promjene brzine točke (tijela) u vremenu.
- Određivanje kinematičkih karakteristika točke
- Putanja točke
U vektorskom referentnom sustavu putanja je opisana izrazom: .
U koordinatnom referentnom sustavu putanja je određena zakonom gibanja točke i opisana je izrazima z = f(x,y)- u prostoru, odn y = f(x)- u avionu.
U prirodnom referentnom sustavu putanja je unaprijed određena. - Određivanje brzine točke u vektorskom koordinatnom sustavu
Kada se zadaje kretanje točke u vektorskom koordinatnom sustavu, omjer kretanja i vremenskog intervala naziva se prosječna vrijednost brzine u tom vremenskom intervalu: .
Uzimajući vremenski interval kao infinitezimalnu vrijednost, dobivamo vrijednost brzine u danom trenutku (trenutačna vrijednost brzine): .
.
Vektor prosječne brzine usmjeren je duž vektora u smjeru kretanja točke, vektor trenutna brzina usmjerena tangencijalno na putanju u smjeru kretanja točke.
Zaključak: brzina točke je vektorska veličina jednaka vremenskoj derivaciji zakona gibanja.
Izvedeno svojstvo: derivacija bilo koje veličine u odnosu na vrijeme određuje brzinu promjene te količine. - Određivanje brzine točke u koordinatnom referentnom sustavu
Stopa promjene koordinata točke: .
.
Modul ukupne brzine točke s pravokutnim koordinatnim sustavom bit će jednak: .
.
Smjer vektora brzine određen je kosinusima smjernih kutova: ,
,
gdje su kutovi između vektora brzine i koordinatnih osi. - Određivanje brzine točke u prirodnom referentnom sustavu
Brzina točke u prirodnom referentnom sustavu definirana je kao derivacija zakona gibanja točke: .
Prema prethodnim zaključcima, vektor brzine usmjeren je tangencijalno na putanju u smjeru kretanja točke i u osi je određen samo jednom projekcijom.
- Kinematika krutog tijela
- U kinematici krutih tijela rješavaju se dva glavna problema:
1) postavljanje pokreta i određivanje kinematičkih karakteristika tijela u cjelini;
2) određivanje kinematičkih karakteristika točaka tijela. - Translatorno gibanje krutog tijela
Translatorno gibanje je gibanje pri kojem pravac povučen kroz dvije točke tijela ostaje paralelan sa svojim prvobitnim položajem.
Teorema: tijekom translatornog gibanja sve točke tijela gibaju se istim putanjama i u svakom trenutku imaju istu veličinu i smjer brzine i akceleracije.
Zaključak: translatorno gibanje krutog tijela određeno je kretanjem bilo koje njegove točke, pa se stoga zadatak i proučavanje njegovog gibanja svodi na kinematiku točke. - Rotacijsko gibanje krutog tijela oko nepomične osi
Rotacijsko gibanje krutog tijela oko nepomične osi je gibanje krutog tijela kod kojeg dvije točke koje pripadaju tijelu ostaju nepomične za cijelo vrijeme gibanja.
Položaj tijela određen je kutom zakreta. Mjerna jedinica za kut je radijan. (radijan - središnji kut kružnice čija je duljina luka jednaka polumjeru, ukupni kut kružnice sadrži 2π radijan.)
Zakon rotacijskog gibanja tijela oko nepomične osi.
Kutnu brzinu i kutnu akceleraciju tijela određujemo metodom diferenciranja:
— kutna brzina, rad/s;
— kutno ubrzanje, rad/s².
Ako secirate tijelo ravninom okomitom na os, odaberite točku na osi rotacije S i proizvoljna točka M, zatim točka M opisat će oko točke S polumjer kruga R. Tijekom dt postoji elementarna rotacija kroz kut , i točka M pomicat će se duž putanje udaljenost .
.
Modul linearne brzine: .
.
Ubrzanje točke M s poznatom putanjom, određuju ga njegove komponente: ,
,
Gdje .
.
Kao rezultat toga dobivamo formule
tangencijalno ubrzanje: ;
;
normalno ubrzanje: .
.

Dinamika
Dinamika je grana teorijske mehanike koja proučava mehaničko kretanje materijalna tijela ovisno o uzrocima koji ih uzrokuju.
- Osnovni pojmovi dinamike
- Inercija- ovo je svojstvo materijalnih tijela da održavaju stanje mirovanja ili uniformnosti pravocrtno gibanje dok vanjske sile ne promijene ovo stanje.
- Težina je kvantitativna mjera tromosti tijela. Jedinica mase je kilogram (kg).
- Materijalna točka- ovo je tijelo s masom čije se dimenzije zanemaruju pri rješavanju ovog problema.
- Središte mase mehaničkog sustava — geometrijska točka, čije su koordinate određene formulama:
Gdje m k , x k , y k , z k— masa i koordinate k- ta točka mehaničkog sustava, m— masa sustava.
U jednoličnom gravitacijskom polju položaj središta mase poklapa se s položajem težišta. - Moment tromosti materijalnog tijela u odnosu na os je kvantitativna mjera tromosti tijekom rotacijskog gibanja.
Moment tromosti materijalne točke u odnosu na os jednak je umnošku mase točke i kvadrata udaljenosti točke od osi: .
.
Moment tromosti sustava (tijela) u odnosu na os jednak je aritmetičkom zbroju momenata tromosti svih točaka:
- Sila tromosti materijalne točke je vektorska veličina jednaka po modulu umnošku mase točke i modula akceleracije i usmjerena suprotno od vektora akceleracije:
- Sila tromosti materijalnog tijela je vektorska veličina koja je po modulu jednaka umnošku mase tijela i modula akceleracije centra mase tijela i usmjerena suprotno od vektora akceleracije centra mase: ,
gdje je akceleracija centra mase tijela. - Elementarni impuls sile je vektorska veličina, jednak umnošku vektor sile za beskonačno malo vrijeme dt:
.
Ukupni impuls sile za Δt jednak je integralu elementarnih impulsa: .
. - Elementarni rad sile je skalarna veličina dA, jednak skalarnom proi









